| Namespace | urn:xml-gov-au:icsm:egeodesy:0.4 | ||
|
Annotations
|
|
||
|
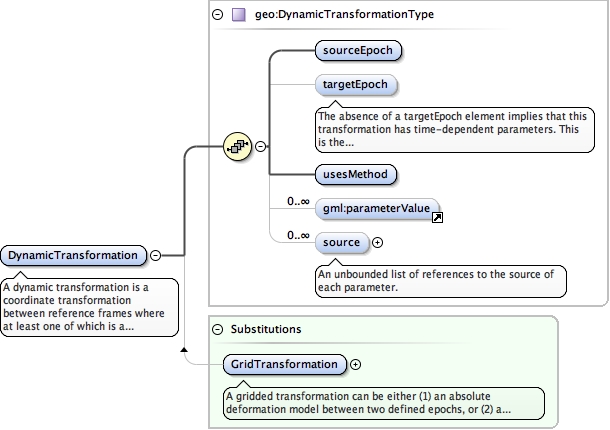
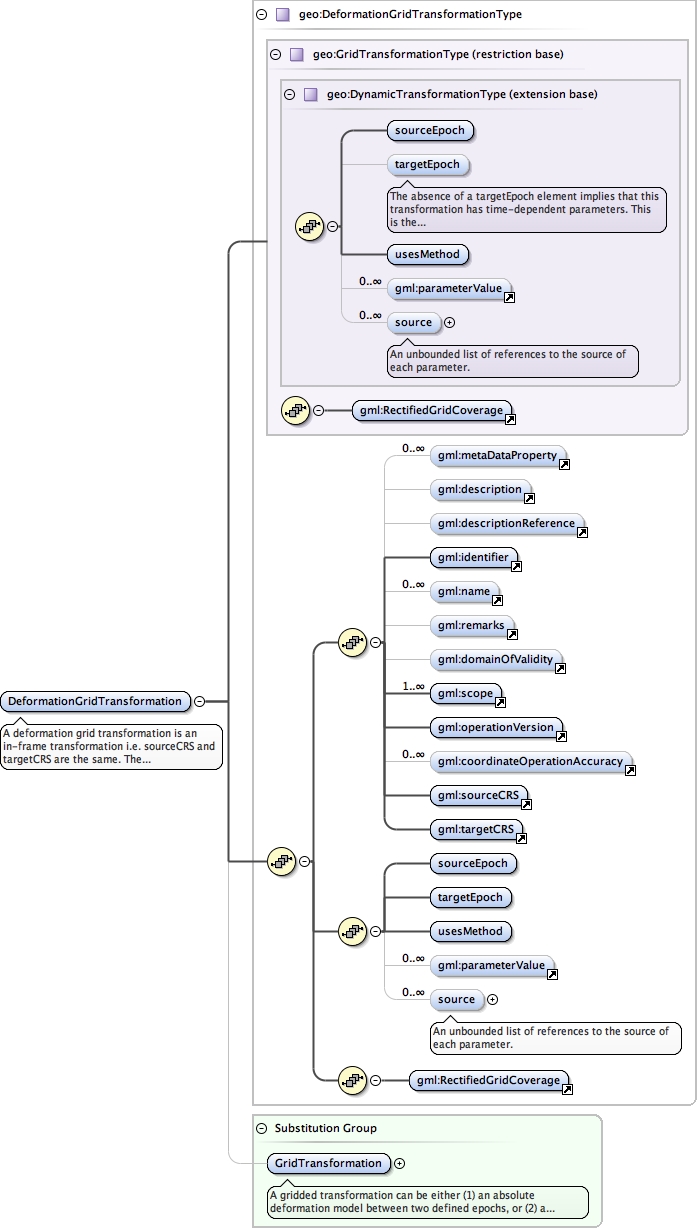
Diagram
|
 |
||
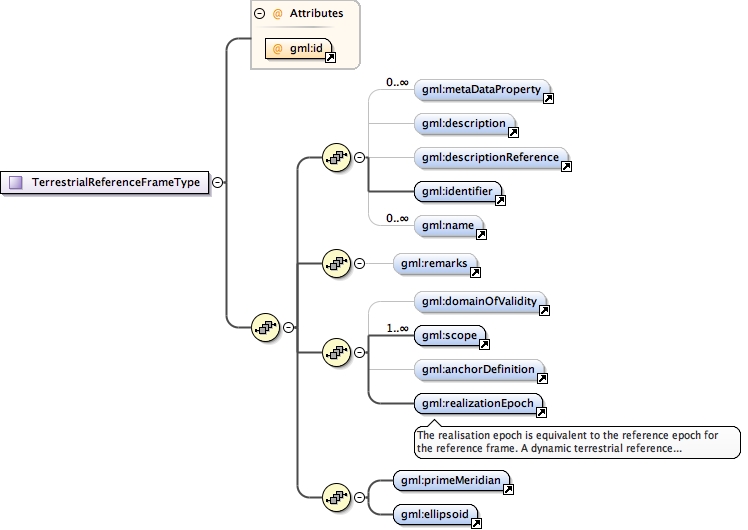
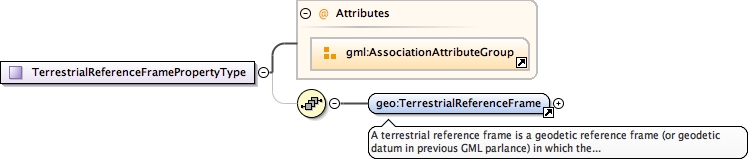
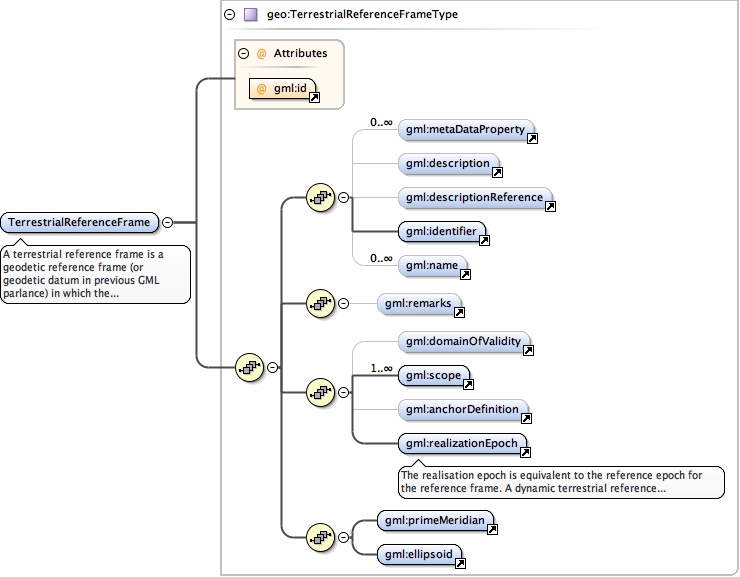
| Type | geo:TerrestrialReferenceFrameType | ||
| Type hierarchy |
|
||
|
Properties
|
|
||
| Substitution Group Affiliation |
|
||
|
Used by
|
|
||
| Model |
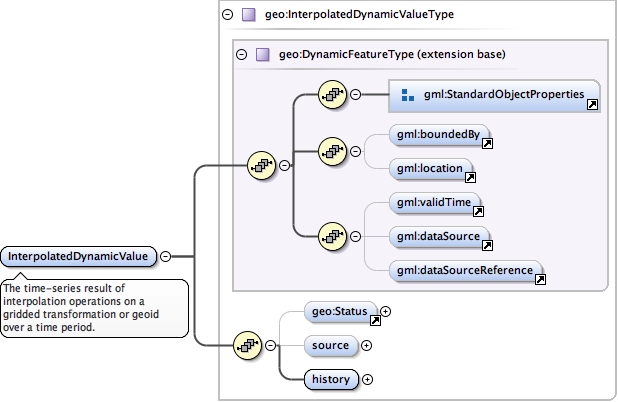
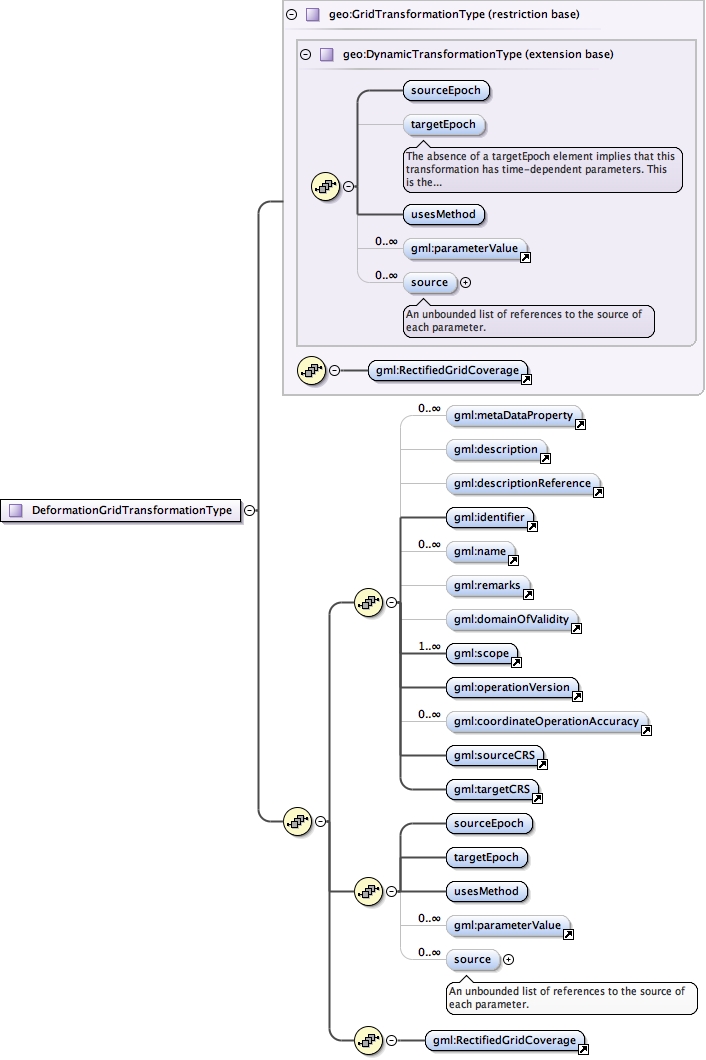
metaDataProperty* , description{0,1} , descriptionReference{0,1} , identifier , name* , remarks{0,1} , domainOfValidity{0,1} , scope+ , anchorDefinition{0,1} , realizationEpoch , primeMeridian , ellipsoid
|
||
| Children | anchorDefinition, description, descriptionReference, domainOfValidity, ellipsoid, identifier, metaDataProperty, name, primeMeridian, realizationEpoch, remarks, scope | ||
|
Instance
|
|
||
|
Source
|
|
||
| Schema location | file:/Users/boss/dev/GeodesyML/schemas/referenceFrame.xsd |